1. Introduction
Early designs of what can be considered precursors to robots started in the First Century A.D. in Byzantium, Alexandria and other places but the first automatons called “robots” appeared in 1921 following the name of “robot” by the Czech writer Karel Čapek who took it from his brother Josef [1]. See Fig. 1. Years later (1941), Isaac Asimov coined the word “Robotics” [2] for the science and technology of robots, and their design, manufacture and application.
But what is a robot? Hereby I introduce some widely accepted definitions.
Robot: A mechanical system that executes repetitive pre-programmed remote tasks with good accuracy with human assistance. Example: Industrial robotic arm.
Teleoperated Robot: A mechanical system that executes various remote tasks with good accuracy and whose behaviour can be dynamically modified with human assistance. Example: Submarine research robots.
Intelligent Robot: A mechanical system which executes various remote tasks with good accuracy and is able to adapt itself to changes during the task execution without any kind of human assistance. Example: Rovers devoted to planetary research.
The first attempts to robotize telescopes were developed by astronomers after electromechanical interfaces to computers became common at observatories. Computer control is the most powerful technique for research today, but computer systems are inherently low voltage and are very suspectable to electrical noise. Thus putting electromechanical devices under computer control was particularly challenging. Early examples were expensive, had limited capabilities, and included a large number of unique subsystems, both in hardware and software. This contributed to a lack of progress in the development of robotic telescopes early in their history, but the situation was going to change rapidly.
Similarly, the above-mentioned definitions can be exteded to Robotic Astronomical Observatories (following the consensus reached after 1 hr of discussion amongst the 80 participants who attended the ”Workshop in Robotic Autonomous Observatories”, held in Málaga on May 18-21, 2009) as it follows:
Automated scheduled telescope (Robot): A telescope that performs pre-programmed observations without immediate help of a remote observer (e.g. avoiding an astronomer moving of the mount by hand).
Remotely operated (remote) telescope Robot: A telescope system that performs remote observations following the request of an observer.
Autonomous Robot (observatory): A telescope that perform various remote observations and is able to adapt itself to changes during the task execution without any kind of human assistance (eg. weather monitoring; the system must not endanger a human !).
2. Robotic Autonomous Observatories: a brief history
In the light of the above mentioned facts and definitions, we can establish the following approximate chronology
2.1. 1968-1975: The automated scheduled telescopes.
The history of robotic telescopes is closely related to the development of automated photoelectric telescopes (APT). The first one was built by A. C. Code and some of his associates at the University of Wisconsin. A prototype was built by A. Code by the mid 1960’s and operated for two or three nights before failing. Once repaired it operated for another few nights, and was used by B. Millis for gathering data on Cepheids for his Dissertation. In 1968, they used one of the first minicomputers, a DEC PDP-8 with 4K of RAM, for controlling a 0.2m reflector telescope with a photometer placed at the prime focus (see Fig. 2). The instrument was identical to the one used in the Orbiting Astrophysical Observatory Program: Code envisioned the use of telescopes in the space and later became co-director of the Space Telescope Science Institute. The instrument was used to measure a fixed sequence (from punched paper tape) of bright stars throughout the night to determine the nightly extinction for the larger telescopes [4] and can be considered the first automated scheduled telescope.
By the same time (c.1968), the 50-inch B&C telescope in Kitt Peak was automated … for one night: the system was too complex and not-reliable enough. A 0.15m f/8 Cassegrain telescope was the next one to be automated in 1970 [5]. All together, they paved the way and several publications on the field were already available by 1975 [6-8].
2.2. 1975-1984: The remotely operated telescopes.
In 1975, a 0.75m telescope was fully automated allowing remote operation via a microwave link [9] and in 1976-77 the Big Telescope Alt-azimuthal 6m telescope in Caucasus [10] and the Wyoming InfraRed Observatory 2.3m telescope [11] became the first large telescopes to be controlled by a computer. In the late 1970’s an IBM 1800 was used by G. Henry and K. Kissell for automated photometry whereas the 0.9m Indiana Univ. telescope was computerized by K. Honeycutt, A. Henden and R. Kaichuck. See also [12].
Following previous works in late 1970’s-early 1980’s, the first system which executed repetitive predefined tasks was achieved on the night of 13 Oct 1983, when L. Boyd and R. Genet run the Phoenix T1 0.25m diameter telescope in Boyd’s backyard observatory in Phoenix, Arizona [13]. Boyd and Genet watched the telescope automatically find center, and make UBV photometric measurements on star after star and finally went to bed. The telescope ran successfully all night, and almost every clear night for the next quarter century. It was recently retired. Also in 1983, M. Bartels computerized a small telescope using a Commodore 64 computer.
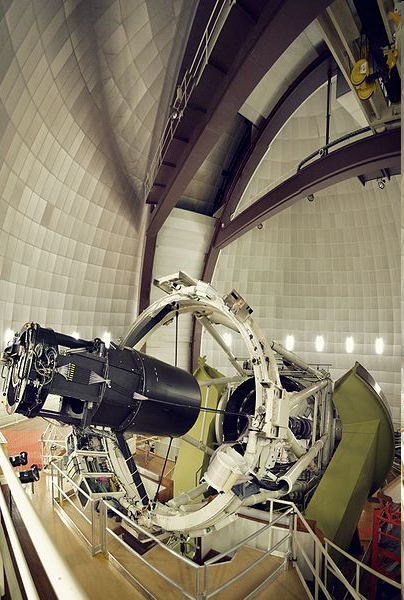
Two years later (1985), a book by M. Trueblood and R. Genet was a landmark engineering study in the field [14]. One of this book’s achievements was pointing out many reasons, some quite subtle, why telescopes could not be reliably pointed using only basic astronomical calculations. The concepts explored in this book share a common heritage with the telescope mount error modelling software called Tpoint, which emerged from the first generation of large automated telescopes in the 1970s, notably the 3.9-m Anglo-Australian Telescope (Fig. 3).
2.3. 1984-2000: The era of autonomous robotic observatories.
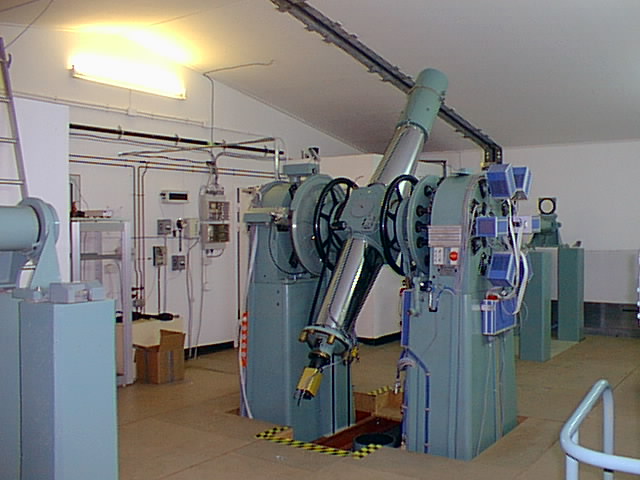
The Carlsberg Meridian Circle (0.18m diameter) in La Palma (Canary Islands, Spain) was jointly automated by Copenhagen University Observatory (Denmark) and the Real Instituto y Observatorio de la Armada en San Fernando (Spain), became in 1984 one of the very first autonomous observatories [16], see Fig. 4.
The first automated telescopes in autonomous observatories were able to start on a pre-programmed sequence of photometric measurements if the sky was clear. This was the case of the Automated Photoelectric Telescope (APT) service, a computer driven system in Mt Hopkins (U.S.) which knew when the Sun set and checked for rain snow, etc [17]. See Fig. 5.
The Fairborn 10 T2 0.25m APT began operations in early 1984 in Fairborn, Ohio, and was moved in early 1986 to the Fred Lawrence Whipple Observatory (FLWO) on Mt Hopkins in southern Arizona, which was operated jointly by the Harvard Smithsonian Center for Astrophysics and the University of Arizona. It was relocated in 1996 to Fairborn Observatory’s new site at 1675m in the Patagonia mountains near Washington Camp, Arizona. Operation of the Fairborn 0.25m APT [18] was supported by FLWO (during its tenure on Mt Hopkins), Fairborn Observatory and Tennessee State University. Until 2001 (16 years), the telescope was dedicated primarily to long term photometric monitoring of semiregular pulsating variable stars and was decommissioned in 2007. Nowadays the TSU group has built 13 instruments including a 2m class telescope).
In 1987-88 R. Genet managed to control a telescope with commands sent over internet. In 1988 M. Bartels used an IBM 286 AT to control Alt/Az devices. The same year D. Gray computerized an equatorial mount and T. Taki described a two-star Alt/Az aligment routine [19].
Thus, the first robots were telescopes with an absolute positioning control and guiding systems. Observatories with automatic weather stations were gradually being introduced in astronomical observatories.
The Berkeley Automated Imaging Telescopes (0.5m and 0.76m diameter telescopes) were used at the astronomy department’s Leuschner Observatory in 1992 and 1994 for detailed monitoring of transient objects and for conducting the Leuschner Observatory Supernova Search (LOSS). The 0.76m Katzman Automated Imaging Telescope (KAIT) in Lick Observatory (Fig. 6) saw first light in 1998 and is still working nowadays and has proven to be very successful in the search for nearby supernovae [20].
The Perugia University Automated Imaging Telescope (0.4m diameter, see Fig. 7) in Italy started monitoring blazars in 1992 [21], nearly simultaneously with the 0.8m Catania Automatic Photoelectric Telescope [22]. The Bradford Robotic Telescope (UK) has been operating via the web since 1993 and accepts requests from anyone and could be considered as one of the first instruments entirely devoted to educational purposes [23]. The 0.5m f/1 Automated Patrol Telescope [24] run by the Univ. of South Wales (Australia) and the University of Iowa Robotic Telescope Facility (0.37m diameter Rigel telescope at Winer Observatory in AZ [25]) joined later (1994). The second one was devoted to undergraduate education and independent research projects.
In 1997, one of the first robotic amateur observatories achieved first light: the Hanna City Robotic Observatory, which made use of a 0.2m Schmidt-Cassegrain telescope [26]. And at about the same time, the CWRU Nassau station 0.9m telescope was probably among the first professional-class instrument publicly available over the internet [27].
During this decade, several global networks of automated telescopes were proposed by several scientists [35-41]. Although none of them became a reality, their ideas inspired others for the next decade.

2.4. 2001-2010: The era of the intelligent robotic observatories.
The first autonomous robotic astronomical observatories were those ones which were able to integrate and coordinate the different automatic subsystems at the observatory (telescope, dome, weather stations). Also the first networks of telescopes worldwide became available. But they required human assistance (teleoperation) for the taking of decisions regarding a given task and/or its supervision.
All these achievements implied a change in the technology (see [44]). For instance, for wide-field system, fast mount and dew control were most essential. For telescopes, open tube design were desirable in order to become lighter and gain a better stabilization of the temperature (but this required a large central baffle to prevent straylight), etc.
The Fairborn Observatory on Mt. Hopkins could be considered a precursor as it achieved first fully autonomous operation in 1987, operating totally unattended and thus can be considered the first reliable truly automatic telescope. Initially it used a low level AI program to select stars for observation and operate the observatory without any daily reporting or frequent dumps of data. Data accumulated for quite some time until L. Boyd and R. Genet would visit the observatory and physically download data from diskettes for mailing out to using astronomers. Two improvements were made within about a year. One was a “morning report” emailed from the autonomous observatory to Boyd every morning reporting on what had occurred the previous night. The other was the initiation of a “Principal Astronomer” (PA) for each telescope. The PA was the human interface with the multiple using astronomers for each telescope–sorting out any conflicts, scheduling observations of standard stars, etc. Within another year the Principle Astronomers were able to access their telescopes via the Internet and download new observational requests during the day which would be observed that night and the data returned via the Internet to them the next morning. The ultimate Principle Astronomer was G. Henry at Tennessee State University, who ended up not only managing a number of robotic telescopes but, with Boyd developing an extensive automated quality control system that scheduled in the observation of standard stars and analyzed the results in an automated fashion. When he arrived at work every morning, Henry brought up screens that showed the analysis of telescope performance, allowing difficulties to be located early on.
A plethora of autonomous robotic observatories (hereafter AROs) had first light in the fist decade of the 21st century: RAPTOR (2002, an array of wide-field lenses of different diameter [45] in the U.S., see Fig. 8); REM (2003, a 60cm robotic nIR telescope in Chile [46]); and many others which we cannot discuss here and are quoted in [47].
They were joined as well by the first global networks: ROTSE-III (four 0.45m telescopes in Australia, Namibia, Turkey and U.S.); BOOTES (four 0.60m telescopes in New Zealand, Russia and two in south Spain, with one devoted to optical/near-IR wavelengths); TAROT (two 0.25m telescopes in France and Chile); MASTER (several 0.20-0.35m wide-field instruments across Russia [48]); ROBONET (three 2.0m telescopes in Hawaii, Australia and Canary Islands [49]); and MONET (two 1.2m telescopes in the U.S. and SouthAfrica [50]).
How AROs are distributed worldwide? The number of AROs on Earth in increasing with more that 100 so far of which nearly 80% are in Europe and in the U.S. (see Fig. 9). It is strange why there are no robotic instrumentations in some of the best astronomical locations in the North Hemisphere like Mt. Maidanak (Uzbekistan), Khurel Togoot (Mongolia) or San Pedro Mártir (México).
3. Science and Technology with Robotic Autonomous Observatories.
Many scientific fields are benefiting from the use of Robotic Autonomous Observatories. For instance, the Lincoln Near Earth Asteroid Research (LINEAR) 1m telescope was used starting in 1998 for detecting and cataloging near-Earth asteroids—also referred to as near-Earth objects (NEOs)—that threaten the Earth. By 2009, 226,000 asteroids, 2019 NEOs and 236 comets had been discovered [51]. Later on, the Moving Object and Transient Event Search System (MOTESS) started as an amateur project in the early 2000’s and discovered hundreds of asteroids and a few comets by using the drift-scan imaging technique. This project was later used to search for variable stars in 300 sq. deg down to R = 19 [52].
Further Galactic searches for variable objects have been carried out with the ROTSE-III and BOOTES networks of robotic telescopes (see Fig. 10), amongst many others. Besides of ROTSE-III successful searches for GRB afterglows, BOOTES and ROBONET are both being used for follow-up observations of GRB and microlensing events.
The Perugian AIT was mainly dedicated to the automatic optical variability monitoring of blazars [53], as well as BART. ROTSE-III has been also used for SN searches and many of the AROs has also been partially devoted to the follow-up of transient events like supernovae or GRB afterglows.
|
Description |
Percentage |
|
Gamma-ray bursts |
22.1% |
|
Service observations |
15.0% |
|
Education |
14.3% |
|
Photometric monitoring |
10.0% |
|
All-sky surveys |
8.6% |
|
Exoplanet searches |
7.9% |
|
Supernovae search |
7.1% |
|
Asteroids |
5.7% |
|
Spectroscopy |
2.9% |
|
Astrometry |
2.9% |
|
AGN, Quasars |
2.9% |
|
Microlensing |
0.7% |
|
Other uses |
5.7% |
Table 1. Scientific use of AROs (adapted from [47]).

An exhaustive list describing the main achievements of AROs worldwide is beyond the scope of this manuscript. Instead we report the scientific use of AROs (Table 1) with the number of instruments as a function of the telescope diameter in Table 2.
|
Description |
Number |
Percentage |
|
≤ 0.25m |
77 |
44.3% |
|
0.25m < aperture ≤ 0.50m |
37 |
23.0% |
|
0.50m < aperture < 0.75m |
14 |
8.6% |
|
0.75m < aperture < 1.00m |
17 |
9.8% |
|
1.00m < aperture < 1.25m |
7 |
4.0% |
|
> 1.25m |
18 |
10.3% |
Table 2. Range of ARO’s main instrument apertures (adapted from [47]).
3.1. Telescope Control Operating Systems.
Two kinds are available: Commercial automatization systems (like TCS by Optical Mechanics for apertures in the range 0.4 – 1 m) which can be either Open or Closed source, and specific control systems (like the one for the 10.4m GTC telescope at La Palma, Fig. 11).
3.2. Observatory Managers.
There are several observatory managers already available:
ATIS (Automatic Telescope Instruction Set): Designed initially in 1984 by L. Boyd and R. Genet (Arizona) and expanded over the years [54], ATIS allows many options for real time, low level AI type of control for both aperture photometry and CCD imaging. The overall system includes provisions for weather sensors, observatory control, etc.
OCAAS (Observatory Control and Astronomical Analysis Software): It was originally developed starting in 1993 by E. Downey [55]. In 2001, the software was purchased by Torus Technologies of Iowa City, Iowa. In late 2002, Torus was purchased by Optical Mechanics, Inc., and the updated OCAAS package was renamed as TALON and released under the GPL.
AUDELA: Developed by A. Klotz et al. (Toulouse, France), starting in 1995 [56]. Open source code. Linux/Windows.
ASCOM: Dessigned in 1998, by B. Denny (USA), as an interface standard for astronomical equipment, based on MS’s Component Object Model, which he called the Astronomy Common Object Model [57]. Mostly used by amateur astronomers, has been also used by professionals. Windows. Widely used in SN, MP searches.
RTS2: The Robotic Telescope System version 2, is being developed by P. Kubánek, (Ondřejov/Granada) starting in 2000 [58,59]. Open source code. Linux/Windows (command line and graphical interface foreseen). Widely used in GRB searches.
INDI: The Instrument Neutral Distributed Interface (INDI) was started in 2003 [60]. In comparison to the Microsoft Windows centric ASCOM standard, INDI is a platform independent protocol developed by E. C. Downey (USA). Open source code. Not so widely spread as the upper layer interface was not done.
¿Open or close loop systems?
In an open loop system, a robotic telescope system points itself and collects its data without inspecting the results of its operations to ensure it is operating properly. An open loop telescope is sometimes said to be operating on faith, in that if something goes wrong, there is no way for the control system to detect it and compensate.
A closed loop system has the capability to evaluate its operations through redundant inputs to detect errors. A common such input would be the capability of evaluating the system’s images to ensure it was pointed at the correct field of view when they were exposed.
4. Massive data production and data analysis
Until all the data are analyzed, the robotic observations are worthless. Are all researchers prepared to handle the huge data flow?. For instance, the data production of an instrument like ToffeeCAM, attached to a robotic telescope, could be as high as ~2 TB/night.
Archiving the data is also most essential. In this era, new generations of powerful tools are being built that rely on reaching transparently across the Internet to query remote services. In order to provide a truly useful service, AROs should make their data archive available to such tools. The International Virtual Observatory Alliance (IVOA) [61] exists to develop inter-operability standards, and AROs should will develop our archive access portal in accordance with those standards [62,63].
Automatic pipelines able to deliver reliable data products written by capable analysts and computer programmers are a must in order to deliver the data products timely [64,65]. The real-time analysis of the data is mandatory if we want to fully exploit the data and to be able to alert other observatories for follow-up observations (see for instance [66]).
5. Education and Public Outreach
An important mission of any robotic telescope could be the possibility of using a fraction of its time for education and public outreach purposes. In this respect, Robotic telescopes can be operated in two ways:
- Direct Mode: remote control with the user directly controlling the telescope using a web/IP cam checking also for weather conditions, etc.
- Service Mode: where the user requests and observation, which is taken by the telescope and returned at a later date. Often called queue-scheduling.
In Direct Mode, one person has control of the telescope, although others can watch the system operating. The observer receives the image as soon as the telescope has made the observation. This is most essential in case of real time demonstrations.
In Service Mode, each person adds their request to the “input pool”. The queue-scheduling computer system then sorts and grades the requests according to the observing details and weather conditions. It aggregates similar requests and creates an observing schedule that it passes to the telescope system. When the observation has been made, an email should be automatically sent to the user who made the request giving details of the location of the image file(s).
6. The future beyond 2010: The era of intelligent robotic astronomical networks.
This is the following step, where human assistance in the taking of decisions will be placed by an artificial intelligent system. This is starting to be developed nowadays [67].
Where to get next? With some instruments already planned for Antartica [68], the far side of the moon is very promising, where stray light and electromagnetic interference are at minimum. Then new drives operating at 1 revolution per month under 1/6th gravity will need to be designed. Telescope-drive engineers and scientists will go on…
7. Conclusions
Since 1984, robotic telescopes have opened a new field in Astrophysics in terms of optimizing the observing time. Most of the existing one-hundred facilities can be considered autonomous robotic observatories (AROs) with some of them being able to provide pre-reduced data.
Archiving the data in VO standards and timely analysis (in real-time if possible!) by specific pipelines is not available in most of them, which seriously compromises the new developments of the future intelligent robotic observatories (the next step forward).
In any case, the big advantange of AROs is that they can be placed in remote locations where human life conditions will be hostile: Antartica now [69] and the Moon (why not?) in the near future.
Acknowledgements
I am very much indebted to R. Genet and P. Abrahams for the very useful suggestions regarding the early times. I also benefited from discussions with R. Cunniffe, J. Gorosabel, S. Guziy, F. Hessman, M. Jelínek, P. Kubánek and A. de Ugarte Postigo. This work was supported by Spanish Ministry of Science and Technology’s projects AYA 2004-01515, AYA 2007-63677 and AYA 2009-14000-C03-01.
References
[1] Čapek, K., R.U.R. (Rossum’s Universal Robots). Translated into English in 2001 by Paul Selver and Nigel Playfair. Dover Publications, 1921.
[2] Asimov, I., “Liar !”. Astounding Science Fiction, May 1941 issue. Reprinted by Cambridge University Press, 1977.
[3] http://www.umich.edu/~engb415/literature/pontee/RUR/RURsmry.html
[4] McNall, J. F., Miedaner, J. L. and Code, A. D. “A computer-controlled photometric telescope”, A. J. 73, 756-761, 1968.
[5] Lee, R.H., R.M. MacQueen, & W.G. Mankin. “A computer-controlled Infrared Eclipse Telescope”. Applied Optics 9:12, 2653-2657, 1970.
[6] Dennison, E. W. “Computer Control of Large Telescopes”. Conference on Large Telescope Design, Proceedings, ESO / CERN Conference, Geneva, eds.: R. M. West, p363ff, 1971.
[7] Dennison, Edwin W. “Recent Computer Installations at the Hale Observatories”, in Automation in Optical Astrophysics, Proceedings of IAU Colloq. 11, Edinburgh, eds.: H. Seddon and M. J. Smyth, Publ. R. Obs. Edinburgh 8, pp8 ff.,1971.
[8] Robinson, L.B. “On-line computers for telescope control and data handling”, Annual Review of Astronomy and Astrophysics 13, 165-185, 1975.
[9] Colgate, S.A., E.P. Moore E. P. and Carlson, R., “A fully automated digitally controlled 30-inch telescope”, Publications of the Astronomical Society of the Pacific 87, 565-575, 1975.
[10] http://w0.sao.ru/Doc-en/Telescopes/bta/descrip.html
[11] Gehrz, R.D.; & Hackwell, J.A., “Exploring the infrared universe from Wyoming”, Sky & Telescope 55, 466-473, 1978.
[12] Skillman, D. “Running a Telescope with a Microcomputer”. Sky & Telescope 61, 71, 1981.
[13] Genet, R. M. “Introduction to Automatic Photoelectric Telescopes (APTs)”, International Amateur-Professional Photoelectric Photometry Communication, No. 25, p.1, 1-25, 1986.
[14] Trueblood, M. and Genet, R. “Microcomputer Control of Telescopes”,
Richmond: Willmann-Bell, 1985.
[15] http://upload.wikimedia.org/wikipedia/commons/thumb/8/8c/Aat.jpg/250px-Aat.jpg
[16] Helmer, L. and Morrison, L.V. ”Carlsberg Automatic Meridian Circle”.
Vistas Astron., 28, pp. 505-518, 1985.
[17] Baliunas, S. et al. “Automatic Photoelectric Telescope III The Mount Hopkins Site“, International Amateur-Professional Photoelectric Photometry Communication, No. 22, p.47, 1985.
[18] Genet, R. et al. “The Automatic Photoelectric Telescope Service”, PASP 99, 660-667, 1987.
[19] Taki, T. “A new concept in computers-aided telescopes”, Sky & Telescope 77, 194, 1989.
[20] Filippenko, A. V. et al. ”The Lick Observatory Supernova Search with the Katzman Automatic Imaging Telescope” in Small-Telescope Astronomy on Global Scales, ASP 246, pp. 121-130, 2001.
[21] Tosti, G. et al. “The Perugia University Automatic Observatory”, PASP 108, pp. 706-713, 1996.
[22] Rodonó, M. “The Catania Automatic Photoelectric Telescope on Mt. Etna: a systematic study of magnetically active stars”, AN, vol. 322, no. 5, p. 333-342 , 2001.
[23] Baruch, J. et al. “Bradford Robotic Telescope: Education & Public Outreach: Journey into space”, Astronomy & Geophysics, Volume 48, Issue 4, pp. 4.27-4.28, 2007.
[24] Ashley, M. C. B., http://www.phys.unsw.edu.au/~mcba/apt/
[25] http://phobos.physics.uiowa.edu/
[26] http://www.mtco.com/~jgunn/
[27] http://astroweb.case.edu/history.shtml
[28] http://astro.berkeley.edu/~bait/kait.html.
[29] Akerlof, C. W. et al., “Gamma-Ray Optical Counterpart Search Experiment (GROCSE)”, AIPC 307, pp. 663-666, 1994.
[30] Park, H.S., et al.,”Super-LOTIS/LOTIS/LITE: Prompt GRB followup experiments”, GAMMA 2001; Gamma-ray Astrophysics 2001, AIPC 587, pp. 181-184, 2001.
[31] Akerlof, C. W. et al., “The ROTSE-III Robotic Telescope System”, PASP 115, 132-140, 2003.
[32] Castro-Tirado, A. J. et al., “The Burst Observer and Optical Transient Exploring System (BOOTES)”, A&AS 138, 583-586, 1999.
[33] Böer, M. et al., “TAROT: Observing gamma-ray bursts in progress”, A&A 138, pp. 579-580, 1999
[34] Jelínek, M. et al., ”BART-Burst Alert Robotic Telescope” , ASPC Series, vol. 330, p. 481, 2005.
[35] Querci, F. R. and Querci, M., in Joint Commission 9 and 25 Meeting: Automated Telescopes for Photometry and Imaging, XXIst IAU General Assembly, Buenos Aires (Argentina), 23 July-1st August 1991, eds. S. J. Adelman and R. J. Dukes, Highlights of Astronomy, Vol. 9, (Kluwer), 1991
[36] Budding, E., “Globalizing Observations: Prospects and Practicalities” in IAU Colloquium 136: Stellar Photometry – Current Techniques and Future Developments, eds. C. J. Butler and I. Elliott (Cambridge Univ. Press), p. 257, 1993.
[37] Crawford, D. L. “GNAT: Global Network of Automated Telescopes”, Astron. Soc. Pacific Conf. Ser., 28, p. 123, 1992.
[38] Crawford, D. L., in Robotic Observatories, ed. M. F. Bode (John Wiley & Sons and Praxis Publ.), p. 77, 1995.
[39] Querci, F. R., Querci, M., Kadiri, S. and Benkhaldoun, Z. , in Symposium: Robotic Telescopes: Current Capabilities, Present Developments, and Future Prospects for Automated Astronomy, held in Flagstaff (Arizona), June 28-30, 1994, eds. G.W. Henry and M. Drummond, ASP Conf. Ser., Vol. 79, 1995.
[40] Querci, F. R., Querci, M. and Kadiri, S., “A complementary Network to GNAT: an Arabian and French Project for automated photometric stations”, in Robotic Observatories, held in Kilkenny (Ireland), 29-31 July, 1992, eds. B. P. Hines and M. F. Bode (Praxis and John Wiley and Sons Publishing), p. 85, 1995.
[41] Querci, F. R. and Querci, M., “Robotic Telescopes and Networks: new tools for education and science”, AS&SS 273, pp. 257-272, 2000.
[42] http://astro.fisica.unipg.it/osserv.htm
[43] http://www.raptor.lanl.gov/
[44] Manly, P. L., Unusual telescopes, Cambridge University Press, 1995.
[45] Vestrand, W. T., et al. ” The RAPTOR experiment: a system for monitoring the optical sky in real time”, Proc. SPIE, 4845, pp. 126-136, 2002
[46] Zerbi, F. et al, “REM telescope, a robotic facility to monitor the prompt afterglow of Gamma Ray Burst”, SPIE, Volume 4841, pp. 737-748, 2003.
[47] Hessman, F. “Robotic Telescope Projects“,
http://www.astro.physik.uni-goettingen.de/~hessman/MONET/links.html
[48] Lipunov, V. M. et al. ” The Master Mobile Astronomical System. Optical Observations of Gamma-Ray Bursts”, Astrophysics, Vol. 48, Issue 3, pp.389-399, 2005.
[49] http://www.astro.ljmu.ac.uk/RoboNet/
[50] http://monet.uni-goettingen.de/
[51] http://www.ll.mit.edu/mission/space/linear/
[52] Kraus, A. L. et al., “The First MOTESS-GNAT Variable-Star Survey”, The Astronomical Journal, Volume 134, Issue 4, pp. 1488-1502, 2007.
[53] http://astro.fisica.unipg.it/PGblazar/tabella2000.htm
[54] Boyd, L.J., Genet, R.M., Hayes, D.S., Automatic Small Telescopes, ed.: D.S. Hayes and R.M. Genet, Fairborn Press, Mesa, p. 35, 1988.
[55] Downey, E.C., Mutel, R.L., “The University of Iowa Automated Telescope Facility”, Astronomical Data Analysis Software and Systems V, A.S.P. Conference Series, Vol. 101, 1996, George H. Jacoby and Jeannette Barnes, eds., p. 380, 1996.
[56] http://audela.ccdaude.com
[57] http://ascom-standards.org
[58] Kubánek, P. et al. “The RTS2 protocol”, Advanced Software and Control for Astronomy II. Edited by Bridger, Alan; Radziwill, Nicole M. Proceedings of the SPIE, Volume 7019, pp. 70192S-70192S-12, 2008.
[59] http://rts2.org
[60] http://www.indilib.org
[61] http://www.ivoa.net
[62] http://www.ivoa.net/Documents/latest/SIA.html
[63] http://www.ivoa.net/Documents/latest/CharacterisationDM.html
[64] Ballester, P. et al. “CLIP: Bridging pipelines to instrument control software”, ASPC 394, pp. 577-580, 2008.
[65] Rité, C. et al. “Production of previews and advanced data products for the ESO Science Archive”, ASPC 394, pp. 605-608, 2008.
[66] Starr, D. L. et al. “Real-time transient classification and broadcast pipeline”, ASPC 394, pp. 609-612, 2008.
[67] White, R. R. et al. ”Thinking Telescopes and the future astronomical meta-network”, AN 327, vol. 8, pp. 758-762, 2006.
[68] Busso, M. et al. “The IRAIT Project Infrared Astronomy from Antartica”, EAS Publ. Series vol. 14, pp. 181-186, 2005.
[69] Ashley, M. C. B. et al. ”Robotic Telescopes on the Antartic plateau”, Astronomische Nachrichten, Vol.325, Issue 6, pp. 619-625, 2004.
Astronomical Observatories (following the consensus reached after 1 hr
of discussion amongst the 80 participants who attended the ”Workshop in
Robotic Autonomous Observatories”, held in Málaga on May 18-21, 2009).
