1. Introducción
Los primeros diseños de lo que se puede considerar precursores de los robots comenzaron en el siglo I d.C. en Bizancio, Alejandría y otros lugares, pero los primeros autómatas llamados "robots" aparecieron en 1921 siguiendo el nombre de "robot" del escritor checo Karel Čapek, que lo tomó de su hermano Josef [1]. Véase la Fig. 1. Años más tarde (1941), Isaac Asimov acuñó la palabra "Robótica" [2] para designar la ciencia y la tecnología de los robots, así como su diseño, fabricación y aplicación.
Pero, ¿qué es un robot? A continuación presento algunas definiciones ampliamente aceptadas.
Robot: Sistema mecánico que ejecuta con buena precisión tareas repetitivas preprogramadas a distancia con asistencia humana. Ejemplo: Brazo robótico industrial.
Robot teleoperado: Sistema mecánico que ejecuta diversas tareas a distancia con buena precisión y cuyo comportamiento puede modificarse dinámicamente con ayuda humana. Ejemplo: Robots de investigación submarina.
Robot inteligente: Sistema mecánico que ejecuta diversas tareas a distancia con buena precisión y es capaz de adaptarse a los cambios que se producen durante la ejecución de la tarea sin ningún tipo de ayuda humana. Ejemplo: Rovers dedicados a la investigación planetaria.
Los primeros intentos de robotizar telescopios fueron desarrollados por astrónomos después de que las interfaces electromecánicas con ordenadores se hicieran habituales en los observatorios. El control por ordenador es la técnica más potente para la investigación hoy en día, pero los sistemas informáticos son intrínsecamente de bajo voltaje y muy susceptibles al ruido eléctrico. Por eso, poner dispositivos electromecánicos bajo control informático era un reto especial. Los primeros ejemplos eran caros, tenían capacidades limitadas e incluían un gran número de subsistemas únicos, tanto en hardware como en software. Esto contribuyó a la falta de avances en el desarrollo de telescopios robóticos al principio de su historia, pero la situación iba a cambiar rápidamente.
Del mismo modo, las definiciones anteriores pueden extenderse a los Observatorios Astronómicos Robóticos (tras el consenso alcanzado tras 1 hora de debate entre los 80 participantes que asistieron al "Workshop en Observatorios Autónomos Robóticos", celebrado en Málaga del 18 al 21 de mayo de 2009) del siguiente modo:
Telescopio programado automatizado (Robot): Telescopio que realiza observaciones preprogramadas sin ayuda inmediata de un observador remoto (por ejemplo, evitando que un astrónomo mueva la montura a mano).
Telescopio teledirigido (remoto) Robot: Sistema de telescopio que realiza observaciones a distancia a petición de un observador.
Robot autónomo (observatorio): Un telescopio que realice diversas observaciones a distancia y sea capaz de adaptarse a los cambios que se produzcan durante la ejecución de la tarea sin ningún tipo de ayuda humana (por ejemplo, vigilancia meteorológica; ¡el sistema no debe poner en peligro a un ser humano!).
2. Observatorios Robóticos Autónomos: breve historia
IA la luz de los hechos y definiciones mencionados, podemos establecer la siguiente cronología aproximada
2.1. 1968Telescopio programado automatizado (Robot)
La historia de los telescopios robotizados está estrechamente relacionada con el desarrollo de los telescopios fotoeléctricos automatizados (APT). El primero fue construido por A. C. Code y algunos de sus colaboradores en la Universidad de Wisconsin. A mediados de la década de 1960, A. Code construyó un prototipo que funcionó durante dos o tres noches antes de averiarse. Una vez reparado, funcionó unas cuantas noches más y fue utilizado por B. Millis para recopilar datos sobre las cefeidas para su tesis doctoral. En 1968, utilizaron uno de los primeros miniordenadores, un DEC PDP-8 con 4K de RAM, para controlar un telescopio reflector de 0,2m con un fotómetro colocado en el foco primario (ver Fig. 2). El instrumento era idéntico al utilizado en el Programa de Observatorios Astrofísicos en Órbita: Code imaginó el uso de telescopios en el espacio y más tarde se convirtió en codirector del Space Telescope Science Institute. El instrumento se utilizó para medir una secuencia fija (a partir de una cinta de papel perforada) de estrellas brillantes a lo largo de la noche con el fin de determinar la extinción nocturna para los telescopios más grandes [4] y puede considerarse el primer telescopio programado automatizado.
Por la misma época (hacia 1968), el telescopio B&C de 50 pulgadas de Kitt Peak se automatizó... durante una noche: el sistema era demasiado complejo y poco fiable. Un telescopio Cassegrain de 0,15 m f/8 fue el siguiente en automatizarse en 1970 [5]. En conjunto, allanaron el camino y en 1975 ya existían varias publicaciones sobre el tema [6-8].
2.2. 1975-1984: Los telescopios teledirigidos.
Tras los trabajos previos de finales de los 70 y principios de los 80, el primer sistema que ejecutó tareas repetitivas predefinidas se consiguió en la noche del 13 de octubre de 1983, cuando L. Boyd y R. Genet hicieron funcionar el telescopio Phoenix T1 de 0,25 m de diámetro en el observatorio del patio trasero de Boyd en Phoenix, Arizona [13]. Boyd y Genet observaron cómo el telescopio encontraba automáticamente el centro y realizaba mediciones fotométricas UBV en una estrella tras otra y finalmente se fueron a dormir. El telescopio funcionó con éxito toda la noche, y casi todas las noches despejadas durante el siguiente cuarto de siglo. Recientemente fue retirado. También en 1983, M. Bartels informatizó un pequeño telescopio utilizando un ordenador Commodore 64
Tras los trabajos previos de finales de los 70 y principios de los 80, el primer sistema que ejecutó tareas repetitivas predefinidas se consiguió en la noche del 13 de octubre de 1983, cuando L. Boyd y R. Genet hicieron funcionar el telescopio Phoenix T1 de 0,25 m de diámetro en el observatorio del patio trasero de Boyd en Phoenix, Arizona [13]. Boyd y Genet observaron cómo el telescopio encontraba automáticamente el centro y realizaba mediciones fotométricas UBV en una estrella tras otra, y finalmente se fueron a la cama. El telescopio funcionó con éxito toda la noche, y casi todas las noches despejadas durante el siguiente cuarto de siglo. Fue retirado recientemente. También en 1983, M. Bartels informatizó un pequeño telescopio utilizando un ordenador Commodore 64.
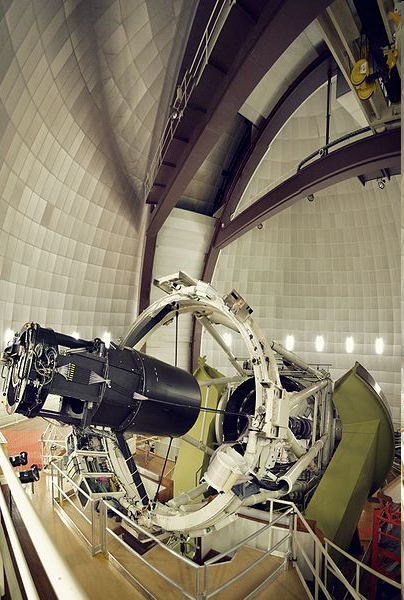
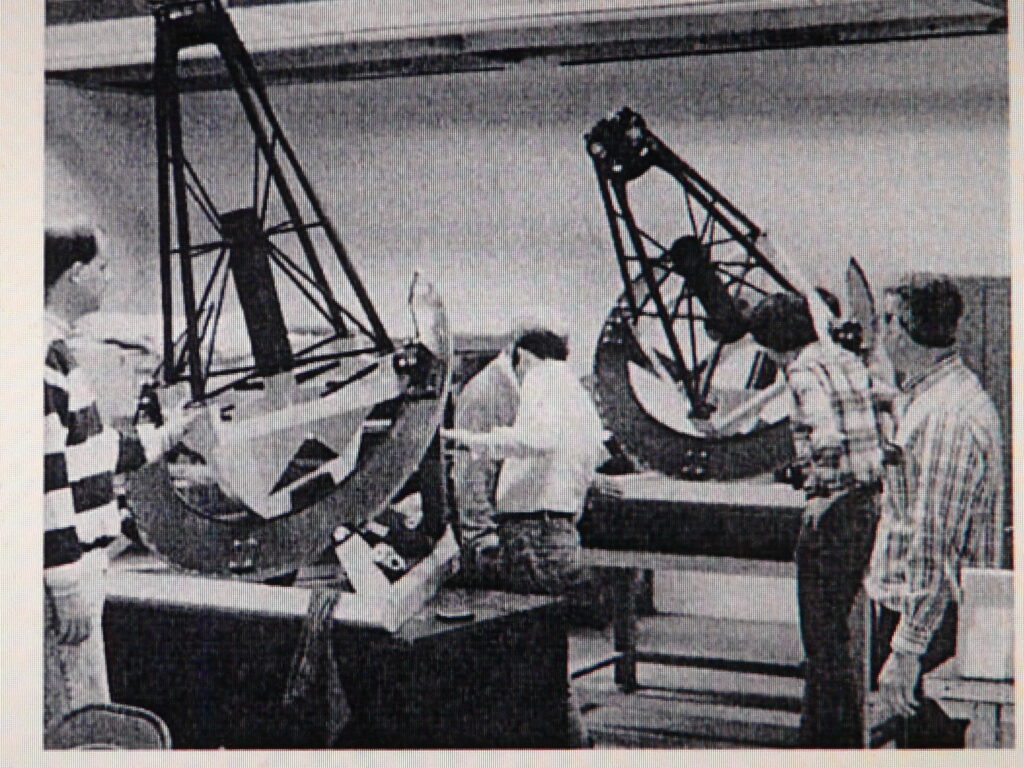
Dos años más tarde (1985), un libro de M. Trueblood y R. Genet constituyó un estudio de ingeniería de referencia en este campo [14]. Uno de los logros de este libro fue señalar muchas razones, algunas bastante sutiles, por las que los telescopios no podían apuntarse de forma fiable utilizando únicamente cálculos astronómicos básicos. Los conceptos explorados en este libro comparten una herencia común con el software de modelización de errores de montaje de telescopios llamado Tpointque surgió de la primera generación de grandes telescopios automatizados en la década de 1970, especialmente el Telescopio Anglo-Australiano de 3,9 m (Fig. 3).
2.3. 1984-2000: La era de los observatorios robóticos autónomos.
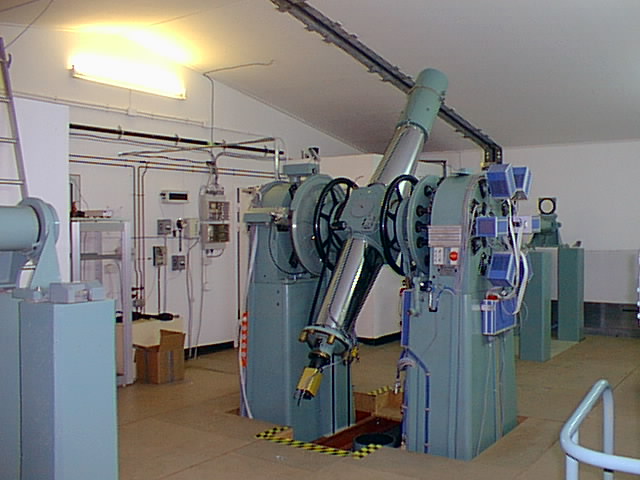
El Círculo Meridiano Carlsberg (0,18 m de diámetro) en La Palma (Islas Canarias, España) fue automatizado conjuntamente por el Observatorio de la Universidad de Copenhague (Dinamarca) y el Royal Institute and Observatory of the Navy in San Fernando (España), se convirtió en 1984 en uno de los primeros observatorios autónomos [16], s, Fig. 4.
Los primeros telescopios automatizados en observatorios autónomos eran capaces de iniciar una secuencia preprogramada de mediciones fotométricas si el cielo estaba despejado. Este fue el caso del servicio Automated Photoelectric Telescope (APT), un sistema controlado por ordenador en Mt Hopkins (EE.UU.) que sabía cuándo se ponía el Sol y comprobaba si llovía nieve, etc. [17]. Véase la Fig. 5.
El Fairborn 10 T2 0,25m APT comenzó a funcionar a principios de 1984 en Fairborn, Ohio, y se trasladó a principios de 1986 al Observatorio Fred Lawrence Whipple (FLWO) en el monte Hopkins, en el sur de Arizona, operado conjuntamente por el Centro Smithsoniano de Astrofísica de Harvard y la Universidad de Arizona. En 1996 se trasladó al nuevo emplazamiento del Observatorio Fairborn, situado a 1675 m en las montañas de la Patagonia, cerca de Washington Camp (Arizona). El funcionamiento del APT de 0,25 m de Fairborn [18] contó con el apoyo de la FLWO (durante su permanencia en el monte Hopkins), el Observatorio de Fairborn y la Universidad Estatal de Tennessee. Hasta 2001 (16 años), el telescopio se dedicó principalmente al seguimiento fotométrico a largo plazo de estrellas variables pulsantes semiregulares y fue puesto fuera de servicio en 2007. En la actualidad, el grupo de la TSU ha construido 13 instrumentos (incluyendo un telescopio de clase de 2m).
En 1987-88 R. Genet consiguió controlar un telescopio con órdenes enviadas por Internet. En 1988 M. Bartels utilizó un IBM 286 AT para controlar dispositivos Alt/Az. Ese mismo año D. Gray informatizó una montura ecuatorial y T. Taki describió una rutina de alineación Alt/Az de dos estrellas [19].
Así, los primeros robots fueron telescopios con un control de posicionamiento absoluto y sistemas de guiado. Los observatorios con estaciones meteorológicas automáticas se fueron introduciendo gradualmente en los observatorios astronómicos.
Los Berkeley Automated Imaging Telescopes (telescopios de 0,5m y 0,76m de diámetro) se utilizaron en el Observatorio Leuschner del departamento de astronomía en 1992 y 1994 para el seguimiento detallado de objetos transitorios y para llevar a cabo la Búsqueda de Supernovas en el Observatorio Leuschner (LOSS). El telescopio Katzman Automated Imaging Telescope (KAIT) de 0,76 m del Observatorio Lick (Fig. 6) vio la luz por primera vez en 1998, sigue funcionando en la actualidad y ha demostrado tener mucho éxito en la búsqueda de supernovas cercanas [20].
El Telescopio Automático de Imágenes de la Universidad de Perugia (0,4 m de diámetro, ver Fig. 7), en Italia, comenzó a monitorizar blazares en 1992 [21], casi simultáneamente con el Telescopio Automático Fotoeléctrico de Catania de 0,8 m [22]. El Telescopio Robótico Bradford (Reino Unido) funciona a través de la web desde 1993 y acepta peticiones de cualquier persona, por lo que podría considerarse como uno de los primeros instrumentos enteramente dedicados a fines educativos [23]. El Telescopio Patrulla Automatizado de 0,5m f/1 [24] gestionado por la Univ. de Gales del Sur (Australia) y la Instalación de Telescopios Robóticos de la Universidad de Iowa (telescopio Rigel de 0,37m de diámetro en el Observatorio Winer en AZ [25]) se unieron más tarde (1994). El segundo se dedicó a la formación de estudiantes universitarios y a proyectos de investigación independientes.
En 1997, uno de los primeros observatorios robóticos de aficionados alcanzó la primera luz: el Hanna City Robotic Observatory, que utilizaba un telescopio Schmidt-Cassegrain de 0,2 m [26]. Y casi al mismo tiempo, el telescopio de 0,9 m de la estación de Nassau de la CWRU fue probablemente uno de los primeros instrumentos de clase profesional disponibles públicamente a través de Internet [27].
Durante esta década, varios científicos propusieron varias redes mundiales de telescopios automatizados [35-41]. Aunque ninguna de ellas se hizo realidad, sus ideas inspiraron a otras durante la década siguiente.

2.4. 2001-2010: La era de los observatorios robóticos inteligentes.
Los primeros observatorios astronómicos robóticos autónomos fueron aquellos capaces de integrar y coordinar los diferentes subsistemas automáticos del observatorio (telescopio, cúpula, estaciones meteorológicas). También aparecieron las primeras redes de telescopios en todo el mundo. Pero requerían asistencia humana (teleoperación) para la toma de decisiones relativas a una tarea determinada y/o su supervisión.
Todos estos logros supusieron un cambio en la tecnología (véase [44]). Por ejemplo, en el caso de los sistemas de campo amplio, lo más esencial era un montaje rápido y el control del rocío. En el caso de los telescopios, era deseable un diseño de tubo abierto para ser más ligero y conseguir una mejor estabilización de la temperatura (pero esto requería un gran deflector central para evitar la luz parásita), etc.
El Observatorio de Fairborn, en el monte Hopkins, podría considerarse un precursor, ya que en 1987 logró por primera vez un funcionamiento totalmente autónomo, operando de forma totalmente desatendida, por lo que puede considerarse el primer telescopio fiable verdaderamente automático. Inicialmente utilizaba un programa de inteligencia artificial de bajo nivel para seleccionar las estrellas a observar y hacer funcionar el observatorio sin informes diarios ni volcados frecuentes de datos. Los datos se acumulaban durante bastante tiempo, hasta que L. Boyd y R. Genet visitaban el observatorio y descargaban físicamente los datos en disquetes para enviarlos por correo a los astrónomos usuarios. En aproximadamente un año se introdujeron dos mejoras. Una fue un "informe matutino" enviado por correo electrónico desde el observatorio autónomo a Boyd cada mañana informando de lo que había ocurrido la noche anterior. La otra fue la creación de un "Astrónomo Principal" (AP) para cada telescopio. El PA era la interfaz humana con los múltiples astrónomos usuarios de cada telescopio, solucionando cualquier conflicto, programando observaciones de estrellas estándar, etc. Al cabo de un año, los Astrónomos Principales pudieron acceder a sus telescopios a través de Internet y descargar nuevas solicitudes de observación durante el día, que serían observadas esa noche y los datos les serían devueltos a través de Internet a la mañana siguiente. El astrónomo principal definitivo fue G. Henry, de la Universidad Estatal de Tennessee, que acabó no sólo gestionando varios telescopios robóticos, sino que, junto con Boyd, desarrolló un amplio sistema automatizado de control de calidad que programaba la observación de estrellas estándar y analizaba los resultados de forma automatizada. Cuando llegaba al trabajo cada mañana, Henry mostraba pantallas en las que aparecía el análisis del rendimiento del telescopio, lo que permitía localizar las dificultades con antelación.
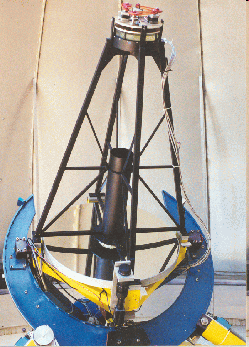
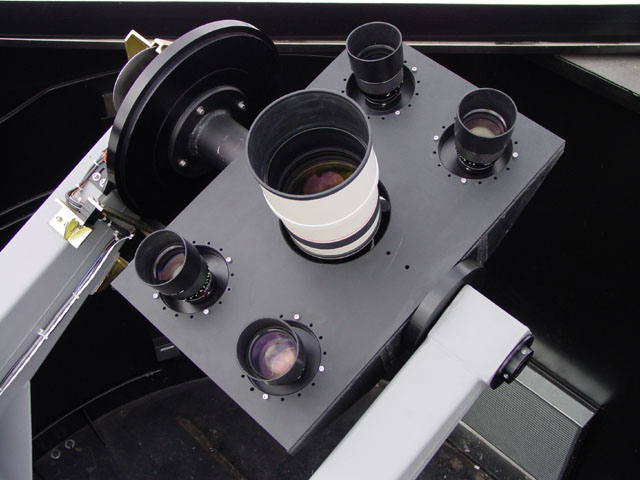
Una plétora de observatorios robóticos autónomos (en adelante, ORA) vieron la luz por primera vez en la primera década del siglo XXI: RAPTOR (2002, un conjunto de lentes de campo amplio de distinto diámetro [45] en EE.UU., ver Fig. 8); REM (2003, un telescopio robótico nIR de 60 cm en Chile [46]); y muchos otros que no podemos comentar aquí y que se citan en [47].
A ellos se unieron también las primeras redes mundiales: ROTSE-III (cuatro telescopios de 0,45 m en Australia, Namibia, Turquía y EE.UU.); BOOTES (cuatro telescopios de 0,60 m en Nueva Zelanda, Rusia y dos en el sur de España, uno de ellos dedicado a longitudes de onda ópticas/IR cercano); TAROT (dos telescopios de 0. 25m en Francia y Chile); MASTER (varios instrumentos de campo amplio de 0,20-0,35m en Rusia [48]); ROBONET (tres telescopios de 2,0m en Hawai, Australia y las Islas Canarias [49]); y MONET (dos telescopios de 1,2m en Estados Unidos y Sudáfrica [50]).
Cómo se distribuyen los ARO en el mundo? El número de AROs en la Tierra está aumentando con más de 100 hasta el momento, de los cuales casi el 80% se encuentran en Europa y en los EE.UU. (ver Fig. 9). Resulta extraño que no haya instrumentos robóticos en algunos de los mejores emplazamientos astronómicos del hemisferio norte, como el monte Maidanak (Uzbekistán), Khurel Togoot (Mongolia) o San Pedro Mártir (México).
3. Ciencia y Tecnología con Observatorios Autónomos Robóticos.
Son muchos los campos científicos que se benefician del uso de observatorios autónomos robotizados. Por ejemplo, el telescopio de 1 m Lincoln Near Earth Asteroid Research (LINEAR) se utilizó a partir de 1998 para detectar y catalogar asteroides cercanos a la Tierra -también denominados objetos cercanos a la Tierra (NEO)- que amenazan a la Tierra. En 2009 se habían descubierto 226.000 asteroides, 2019 objetos cercanos a la Tierra y 236 cometas [51]. Posteriormente, el Moving Object and Transient Event Search System (MOTESS) comenzó como un proyecto de aficionados a principios de la década de 2000 y descubrió cientos de asteroides y unos pocos cometas mediante la técnica de imagen de barrido a la deriva. Este proyecto se utilizó posteriormente para buscar estrellas variables en 300 grados cuadrados hasta R = 19 [52].
Se han llevado a cabo otras búsquedas galácticas de objetos variables con las redes de telescopios robóticos ROTSE-III y BOOTES (véase la Fig. 10), entre otras muchas. Además del éxito de ROTSE-III en la búsqueda de reflectores de GRB, tanto BOOTES como ROBONET se están utilizando para observaciones de seguimiento de GRB y eventos de microlentes.
El AIT de Perugia se dedicó principalmente al seguimiento automático de la variabilidad óptica de blazares [53], así como a BART. ROTSE-III también se ha utilizado para la búsqueda de SN y muchos de los AROs también se han dedicado parcialmente al seguimiento de sucesos transitorios como supernovas o resplandores de GRB.
|
Descripción |
Porcentaje |
|
Explosiones de rayos gamma |
22.1% |
|
Observaciones del servicio |
15.0% |
|
Educación |
14.3% |
|
Control fotométrico |
10.0% |
|
Sondeos todo cielo |
8.6% |
|
Búsqueda de exoplanetas |
7.9% |
|
Búsqueda de supernovas |
7.1% |
|
Asteroides |
5.7% |
|
Espectroscopía |
2.9% |
|
Astrometría |
2.9% |
|
AGN, Quasars |
2.9% |
|
Microlensing |
0.7% |
|
Otros usos |
5.7% |
Tabla 1. Uso científico de las ORA (adaptado de [47]).

Una lista exhaustiva que describa los principales logros de los AROs en todo el mundo está fuera del alcance de este manuscrito. En su lugar, informamos del uso científico de los ARO (Tabla 1) con el número de instrumentos en función del diámetro del telescopio en la Tabla 2.
|
Descripción |
Número |
Porcentaje |
|
≤ 0.25m |
77 |
44.3% |
|
0.25m < aperture ≤ 0.50m |
37 |
23.0% |
|
0.50m < aperture < 0.75m |
14 |
8.6% |
|
0.75m < aperture < 1.00m |
17 |
9.8% |
|
1.00m < aperture < 1.25m |
7 |
4.0% |
|
> 1.25m |
18 |
10.3% |
Tabla 2. Rango de aperturas de los principales instrumentos del ARO (adaptado de [47]).
3.1. Sistemas operativos de control de telescopios.
Existen dos tipos: Sistemas de automatización comerciales (como el TCS de Optical Mechanics para aperturas en el rango de 0,4 - 1 m) que pueden ser de código Abierto o Cerrado, y sistemas de control específicos (como el del telescopio GTC de 10,4 m de La Palma, Fig. 11).
3.2. Responsables del Observatorio.
Ya existen varios gestores de observatorios:
ATIS (Conjunto de instrucciones automáticas para telescopios): Diseñado inicialmente en 1984 por L. Boyd y R. Genet (Arizona) y ampliado a lo largo de los años [54], ATIS permite muchas opciones de control en tiempo real, de tipo IA de bajo nivel, tanto para fotometría de apertura como para imágenes CCD. El sistema global incluye disposiciones para sensores L profundos, control de observatorio, etc.
OCAAS (Observatory Control and Astronomical Analysis Software): Fue desarrollado originalmente a partir de 1993 por E. Downey [55]. En 2001, el software fue adquirido por Torus Technologies de Iowa City, Iowa. A finales de 2002, Torus fue comprada por Optical Mechanics, Inc, y el paquete OCAAS actualizado fue renombrado como TALON y liberado bajo la GPL.
AUDELA: Desarrollado por A. Klotz et al. (Toulouse, Francia), a partir de 1995 [56]. Código fuente abierto. Linux/Windows.
ASCOM: Diseñado en 1998, por B. Denny (EE.UU.), como un estándar de interfaz para equipos astronómicos, basado en el Component Object Model de MS, al que llamó Astronomy Common Object Model [57]. Utilizado principalmente por astrónomos aficionados, también ha sido utilizado por profesionales. Windows. Ampliamente utilizado en búsquedas SN, MP.
RTS2: El Sistema de Telescopio Robótico versión 2, está siendo desarrollado por P. Kubánek, (Ondřejov/Granada) desde el año 2000 [58,59]. Código fuente abierto. Linux/Windows (línea de comandos e interfaz gráfica previstas). Ampliamente utilizado en búsquedas de GRB.
INDI: La Instrument Neutral Distributed Interface (INDI) se puso en marcha en 2003 [60]. En comparación con el estándar ASCOM centrado en Microsoft Windows, INDI es un protocolo independiente de la plataforma desarrollado por E. C. Downey (EE.UU.). Código fuente abierto. No está tan extendido porque no se ha realizado la interfaz de la capa superior.
¿Sistemas de bucle abierto o cerrado?
En un sistema de bucle abierto, un sistema de telescopio robótico se apunta a sí mismo y recoge sus datos sin inspeccionar los resultados de sus operaciones para asegurarse de que funciona correctamente. A veces se dice que un telescopio de bucle abierto funciona por fe, en el sentido de que si algo va mal, no hay forma de que el sistema de control lo detecte y compense.
Un sistema de bucle cerrado tiene la capacidad de evaluar sus operaciones a través de entradas redundantes para detectar errores. Una entrada común de este tipo sería la capacidad de evaluar las imágenes del sistema para asegurarse de que estaba apuntando al campo de visión correcto cuando se expusieron.
4. Producción masiva de datos y análisis de datos.
Hasta que se analicen todos los datos, las observaciones robóticas no tienen valor. ¿Están preparados todos los investigadores para manejar el enorme flujo de datos? Por ejemplo, la producción de datos de un instrumento como ToffeeCAM, unido a un telescopio robótico, podría ser tan alta como ~2 TB/noche.
Archivar los datos también es esencial. En esta era, se están construyendo nuevas generaciones de herramientas potentes que dependen de alcanzar de manera transparente a través de Internet para consultar servicios remotos. Para proporcionar un servicio verdaderamente útil, los ARO deben poner su archivo de datos a disposición de dichas herramientas. La Alianza Internacional de Observatorios Virtuales (IVOA) [61] existe para desarrollar estándares de interoperabilidad, y los ARO deben desarrollar nuestro portal de acceso a los archivos de acuerdo con esos estándares [62,63].
Los flujos de trabajo automáticos capaces de proporcionar productos de datos confiables escritos por analistas y programadores competentes son imprescindibles para entregar los productos de datos de manera oportuna [64,65]. El análisis en tiempo real de los datos es obligatorio si queremos aprovechar al máximo los datos y poder alertar a otras observatorios para realizar observaciones de seguimiento (véase, por ejemplo, [66]).
5. Educación y divulgación pública.
Una misión importante de cualquier telescopio robótico podría ser la posibilidad de utilizar una fracción de su tiempo para fines de educación y divulgación pública. En este sentido, los telescopios robóticos pueden operarse de dos maneras:
- Modo Directo: control remoto con el usuario controlando directamente el telescopio mediante una cámara web/IP, verificando también las condiciones climáticas, etc.
- Modo de Servicio: donde el usuario solicita una observación, que es realizada por el telescopio y se devuelve en una fecha posterior. A menudo se le llama programación de cola.
En el Modo Directo, una persona tiene el control del telescopio, aunque otros pueden observar el sistema en funcionamiento. El observador recibe la imagen tan pronto como el telescopio haya realizado la observación. Esto es esencial en caso de demostraciones en tiempo real.
En el Modo de Servicio, cada persona agrega su solicitud al "conjunto de entradas". El sistema informático de programación de colas clasifica y califica las solicitudes según los detalles de la observación y las condiciones meteorológicas. Agrega solicitudes similares y crea un programa de observación que se transmite al sistema del telescopio. Cuando se ha realizado la observación, se debe enviar automáticamente un correo electrónico al usuario que hizo la solicitud dando detalles de la ubicación del archivo o archivos de imagen.
6. El futuro más allá de 2010: la era de las redes astronómicas robóticas inteligentes.
Este es el siguiente paso, en el que la asistencia humana en la toma de decisiones será reemplazada por un sistema de inteligencia artificial. Esto está comenzando a desarrollarse en la actualidad [67].
¿Hacia dónde ir después? Con algunos instrumentos ya planeados para la Antártida [68], el lado lejano de la Luna es muy prometedor, donde la luz dispersa y la interferencia electromagnética son mínimas. Entonces, se necesitarán nuevos motores que operen a 1 revolución por mes bajo una gravedad de 1/6, que deberán ser diseñados. Los ingenieros y científicos de telescopios continuarán avanzando...
7. Conclusiones
Desde 1984, los telescopios robóticos han abierto un nuevo campo en Astrofísica en términos de optimización del tiempo de observación. La mayoría de las cien instalaciones existentes se pueden considerar observatorios robóticos autónomos (ARO), y algunos de ellos pueden proporcionar datos preprocesados.
La archivación de los datos en los estándares del VO y el análisis oportuno (¡en tiempo real si es posible!) mediante flujos de trabajo específicos no está disponible en la mayoría de ellos, lo que compromete seriamente los nuevos desarrollos de los futuros observatorios robóticos inteligentes (el próximo paso adelante).
En cualquier caso, la gran ventaja de los ARO es que se pueden colocar en ubicaciones remotas donde las condiciones de vida humana serían hostiles: la Antártida ahora [69] y la Luna (¿por qué no?) en un futuro cercano.
Agradecimientos
Estoy muy agradecido con R. Genet y P. Abrahams por las sugerencias muy útiles con respecto a los primeros tiempos. También me beneficié de las discusiones con R. Cunniffe, J. Gorosabel, S. Guziy, F. Hessman, M. Jelínek, P. Kubánek y A. de Ugarte Postigo. Este trabajo fue apoyado por los proyectos del Ministerio de Ciencia y Tecnología de España AYA 2004-01515, AYA 2007-63677 y AYA 2009-14000-C03-01.
Referencias
[1] Čapek, K., R.U.R. (Rossum’s Universal Robots). Translated into English in 2001 by Paul Selver and Nigel Playfair. Dover Publications, 1921.
[2] Asimov, I., “Liar !”. Astounding Science Fiction, May 1941 issue. Reprinted by Cambridge University Press, 1977.
[3] http://www.umich.edu/~engb415/literature/pontee/RUR/RURsmry.html
[4] McNall, J. F., Miedaner, J. L. and Code, A. D. “A computer-controlled photometric telescope”, A. J. 73, 756-761, 1968.
[5] Lee, R.H., R.M. MacQueen, & W.G. Mankin. “A computer-controlled Infrared Eclipse Telescope”. Applied Optics 9:12, 2653-2657, 1970.
[6] Dennison, E. W. “Computer Control of Large Telescopes”. Conference on Large Telescope Design, Proceedings, ESO / CERN Conference, Geneva, eds.: R. M. West, p363ff, 1971.
[7] Dennison, Edwin W. “Recent Computer Installations at the Hale Observatories”, in Automation in Optical Astrophysics, Proceedings of IAU Colloq. 11, Edinburgh, eds.: H. Seddon and M. J. Smyth, Publ. R. Obs. Edinburgh 8, pp8 ff.,1971.
[8] Robinson, L.B. “On-line computers for telescope control and data handling”, Annual Review of Astronomy and Astrophysics 13, 165-185, 1975.
[9] Colgate, S.A., E.P. Moore E. P. and Carlson, R., “A fully automated digitally controlled 30-inch telescope”, Publications of the Astronomical Society of the Pacific 87, 565-575, 1975.
[10] http://w0.sao.ru/Doc-en/Telescopes/bta/descrip.html
[11] Gehrz, R.D.; & Hackwell, J.A., “Exploring the infrared universe from Wyoming”, Sky & Telescope 55, 466-473, 1978.
[12] Skillman, D. “Running a Telescope with a Microcomputer”. Sky & Telescope 61, 71, 1981.
[13] Genet, R. M. “Introduction to Automatic Photoelectric Telescopes (APTs)”, International Amateur-Professional Photoelectric Photometry Communication, No. 25, p.1, 1-25, 1986.
[14] Trueblood, M. and Genet, R. “Microcomputer Control of Telescopes”,
Richmond: Willmann-Bell, 1985.
[15] http://upload.wikimedia.org/wikipedia/commons/thumb/8/8c/Aat.jpg/250px-Aat.jpg
[16] Helmer, L. and Morrison, L.V. ”Carlsberg Automatic Meridian Circle”.
Vistas Astron., 28, pp. 505-518, 1985.
[17] Baliunas, S. et al. “Automatic Photoelectric Telescope III The Mount Hopkins Site“, International Amateur-Professional Photoelectric Photometry Communication, No. 22, p.47, 1985.
[18] Genet, R. et al. “The Automatic Photoelectric Telescope Service”, PASP 99, 660-667, 1987.
[19] Taki, T. “A new concept in computers-aided telescopes”, Sky & Telescope 77, 194, 1989.
[20] Filippenko, A. V. et al. ”The Lick Observatory Supernova Search with the Katzman Automatic Imaging Telescope” in Small-Telescope Astronomy on Global Scales, ASP 246, pp. 121-130, 2001.
[21] Tosti, G. et al. “The Perugia University Automatic Observatory”, PASP 108, pp. 706-713, 1996.
[22] Rodonó, M. “The Catania Automatic Photoelectric Telescope on Mt. Etna: a systematic study of magnetically active stars”, AN, vol. 322, no. 5, p. 333-342 , 2001.
[23] Baruch, J. et al. “Bradford Robotic Telescope: Education & Public Outreach: Journey into space”, Astronomy & Geophysics, Volume 48, Issue 4, pp. 4.27-4.28, 2007.
[24] Ashley, M. C. B., http://www.phys.unsw.edu.au/~mcba/apt/
[25] http://phobos.physics.uiowa.edu/
[26] http://www.mtco.com/~jgunn/
[27] http://astroweb.case.edu/history.shtml
[28] http://astro.berkeley.edu/~bait/kait.html.
[29] Akerlof, C. W. et al., “Gamma-Ray Optical Counterpart Search Experiment (GROCSE)”, AIPC 307, pp. 663-666, 1994.
[30] Park, H.S., et al.,”Super-LOTIS/LOTIS/LITE: Prompt GRB followup experiments”, GAMMA 2001; Gamma-ray Astrophysics 2001, AIPC 587, pp. 181-184, 2001.
[31] Akerlof, C. W. et al., “The ROTSE-III Robotic Telescope System”, PASP 115, 132-140, 2003.
[32] Castro-Tirado, A. J. et al., “The Burst Observer and Optical Transient Exploring System (BOOTES)”, A&AS 138, 583-586, 1999.
[33] Böer, M. et al., “TAROT: Observing gamma-ray bursts in progress”, A&A 138, pp. 579-580, 1999
[34] Jelínek, M. et al., ”BART-Burst Alert Robotic Telescope” , ASPC Series, vol. 330, p. 481, 2005.
[35] Querci, F. R. and Querci, M., in Joint Commission 9 and 25 Meeting: Automated Telescopes for Photometry and Imaging, XXIst IAU General Assembly, Buenos Aires (Argentina), 23 July-1st August 1991, eds. S. J. Adelman and R. J. Dukes, Highlights of Astronomy, Vol. 9, (Kluwer), 1991
[36] Budding, E., “Globalizing Observations: Prospects and Practicalities” in IAU Colloquium 136: Stellar Photometry – Current Techniques and Future Developments, eds. C. J. Butler and I. Elliott (Cambridge Univ. Press), p. 257, 1993.
[37] Crawford, D. L. “GNAT: Global Network of Automated Telescopes”, Astron. Soc. Pacific Conf. Ser., 28, p. 123, 1992.
[38] Crawford, D. L., in Robotic Observatories, ed. M. F. Bode (John Wiley & Sons and Praxis Publ.), p. 77, 1995.
[39] Querci, F. R., Querci, M., Kadiri, S. and Benkhaldoun, Z. , in Symposium: Robotic Telescopes: Current Capabilities, Present Developments, and Future Prospects for Automated Astronomy, held in Flagstaff (Arizona), June 28-30, 1994, eds. G.W. Henry and M. Drummond, ASP Conf. Ser., Vol. 79, 1995.
[40] Querci, F. R., Querci, M. and Kadiri, S., “A complementary Network to GNAT: an Arabian and French Project for automated photometric stations”, in Robotic Observatories, held in Kilkenny (Ireland), 29-31 July, 1992, eds. B. P. Hines and M. F. Bode (Praxis and John Wiley and Sons Publishing), p. 85, 1995.
[41] Querci, F. R. and Querci, M., “Robotic Telescopes and Networks: new tools for education and science”, AS&SS 273, pp. 257-272, 2000.
[42] http://astro.fisica.unipg.it/osserv.htm
[43] http://www.raptor.lanl.gov/
[44] Manly, P. L., Unusual telescopes, Cambridge University Press, 1995.
[45] Vestrand, W. T., et al. ” The RAPTOR experiment: a system for monitoring the optical sky in real time”, Proc. SPIE, 4845, pp. 126-136, 2002
[46] Zerbi, F. et al, “REM telescope, a robotic facility to monitor the prompt afterglow of Gamma Ray Burst”, SPIE, Volume 4841, pp. 737-748, 2003.
[47] Hessman, F. “Robotic Telescope Projects“,
http://www.astro.physik.uni-goettingen.de/~hessman/MONET/links.html
[48] Lipunov, V. M. et al. ” The Master Mobile Astronomical System. Optical Observations of Gamma-Ray Bursts”, Astrophysics, Vol. 48, Issue 3, pp.389-399, 2005.
[49] http://www.astro.ljmu.ac.uk/RoboNet/
[50] http://monet.uni-goettingen.de/
[51] http://www.ll.mit.edu/mission/space/linear/
[52] Kraus, A. L. et al., “The First MOTESS-GNAT Variable-Star Survey”, The Astronomical Journal, Volume 134, Issue 4, pp. 1488-1502, 2007.
[53] http://astro.fisica.unipg.it/PGblazar/tabella2000.htm
[54] Boyd, L.J., Genet, R.M., Hayes, D.S., Automatic Small Telescopes, ed.: D.S. Hayes and R.M. Genet, Fairborn Press, Mesa, p. 35, 1988.
[55] Downey, E.C., Mutel, R.L., “The University of Iowa Automated Telescope Facility”, Astronomical Data Analysis Software and Systems V, A.S.P. Conference Series, Vol. 101, 1996, George H. Jacoby and Jeannette Barnes, eds., p. 380, 1996.
[56] http://audela.ccdaude.com
[57] http://ascom-standards.org
[58] Kubánek, P. et al. “The RTS2 protocol”, Advanced Software and Control for Astronomy II. Edited by Bridger, Alan; Radziwill, Nicole M. Proceedings of the SPIE, Volume 7019, pp. 70192S-70192S-12, 2008.
[59] http://rts2.org
[60] http://www.indilib.org
[61] http://www.ivoa.net
[62] http://www.ivoa.net/Documents/latest/SIA.html
[63] http://www.ivoa.net/Documents/latest/CharacterisationDM.html
[64] Ballester, P. et al. “CLIP: Bridging pipelines to instrument control software”, ASPC 394, pp. 577-580, 2008.
[65] Rité, C. et al. “Production of previews and advanced data products for the ESO Science Archive”, ASPC 394, pp. 605-608, 2008.
[66] Starr, D. L. et al. “Real-time transient classification and broadcast pipeline”, ASPC 394, pp. 609-612, 2008.
[67] White, R. R. et al. ”Thinking Telescopes and the future astronomical meta-network”, AN 327, vol. 8, pp. 758-762, 2006.
[68] Busso, M. et al. “The IRAIT Project Infrared Astronomy from Antartica”, EAS Publ. Series vol. 14, pp. 181-186, 2005.
[69] Ashley, M. C. B. et al. ”Robotic Telescopes on the Antartic plateau”, Astronomische Nachrichten, Vol.325, Issue 6, pp. 619-625, 2004.